FLASHRELATE: Extracting Relational Data from
Semi-Structured Spreadsheets Using Examples
Daniel W. Barowy
University of Massachusetts Amherst
Sumit Gulwani Ted Hart
Benjamin Zorn
Microsoft Research
{sumitg, ted.hart, ben.zorn}@microsoft.com
Abstract
Spreadsheets store a tremendous amount of important data.
One reason spreadsheets are so successful is that they are
both easy to use and allow users great expressiveness in
storing and manipulating their data. This flexibility comes
at a price, as presentation elements are often combined with
the underlying data model. As a result, many spreadsheets
contain data in ad-hoc formats. These formats complicate
the use of traditional relational tools which require data in
a normalized form. Normalizing data from these formats is
often tedious or requires programming, and often, a user may
prefer the original presentation.
We describe an approach that allows users to easily ex-
tract structured data from spreadsheets without program-
ming. We make two contributions. First, we describe a novel
domain specific language called FLARE that extends tra-
ditional regular expressions with spatial constraints. Sec-
ond, we describe an algorithm called FLASHRELATE that
can synthesize FLARE programs from user-provided positive
and negative examples. Using 43 benchmarks drawn both
from a standard spreadsheet corpus and from Excel user-help
forums, we demonstrate that correct extraction programs can
be synthesized quickly from a small number of examples.
Our approach generalizes to many data-cleaning tasks on
semi-structured spreadsheets.
Categories and Subject Descriptors CR-number [subcat-
egory]: third-level
Keywords Program Synthesis, Domain Specific Languages,
Heuristic Search, Spreadsheets
1. Introduction
There are an estimated 500 million Microsoft Excel users
worldwide [24]. It is thus not surprising that a tremendous
amount of important data is stored in spreadsheets.
As with other document types such as text files and web
pages, spreadsheets combine their data model and view. This
flexibility gives the spreadsheet creator a large degree of
freedom in encoding their data. It also complicates the use
of powerful database tools (e.g., relational queries) which
expect data in a particular form. Although spreadsheets are
tabular and ostensibly tables, end-users may organize their
data in any two-dimensional form that they find convenient.
This problem is widespread. Recent research suggests
that the vast majority of spreadsheets available on the web
cannot be trivially converted to database relations [6]. We
argue that the cause is due to the multidimensionality of data.
Representing multidimensional data in a two-dimensional
spreadsheet presents a fundamental problem for users, since
additional dimensions need to be projected into a 2D grid.
Spreadsheet authors often solve this problem by crafting
clever encodings of their data.
While expert users might recognize when database tech-
nologies might be more appropriate, they do so because
these technologies facilitate automatic processing. In con-
trast, spreadsheets allow compact and intuitive visual rep-
resentations of data better suited for human understanding.
Since these representations vary from spreadsheet to spread-
sheet, each unique encoding must be decoded if they are to
be used with more powerful data tools.
The conflating of presentation information with data is
commonplace in many domains. The recognition that non-
experts are unlikely to embrace data management tools de-
signed for automatic processing has lead to the development
of numerous domain-specific technologies for data extrac-
tion. Scripting languages like Perl, Awk, and Python have
been designed to support string processing in text files. Web
technologies like XQuery, HTQL, XSLT, and SXPath can be
used to extract data from webpages. There are no such tools
for spreadsheets.
Example To make our contributions more concrete, we re-
fer to the example showing in Fig. 1(a), a real spreadsheet
taken from the EUSES corpus [11]. The spreadsheet shows
timber harvests by country and year. It also packs data about
a particular country into value/year pairs within a row, ap-
pending comments to the far right. The original author prob-
ably structured the data in this form to avoid having the data
in a long thin column, which would be harder to read.
Consider the steps that a programmer must undertake to
compute the average harvest in 1950 from this representa-
FLASHRELATE 1 2014/4/23
A B C D E . . . R
1 value year value year Comments
2 Albania 1,000 1950 930 1981 FRA 1
3 Austria 3,139 1951 3,177 1955 FRA 3
4 Belgium 541 1947 601 1950
5 Bulgaria 2,964 1947 3,259 1958 FRA 1
6 Czech . . . 2,416 1950 2,503 1960 NC
. . .
(a)
A B C D
1 Albania 1,000 1950 FRA 1
2 Albania 930 1981 FRA 1
. . .
5 Austria 3,139 1951 FRA 3
6 Austria 3,177 1955 FRA 3
. . .
9 Belgium 541 1947
10 Belgium 601 1950
. . .
(b)
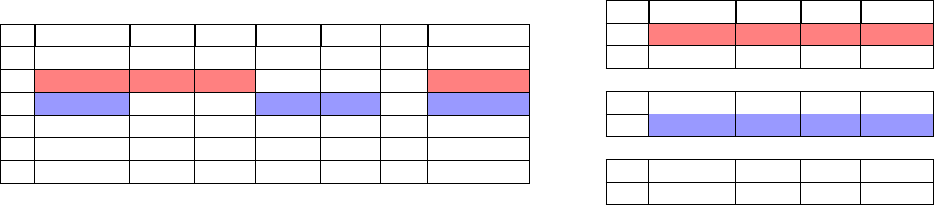
Figure 1: (a) A semi-structured spreadsheet with two example tuples highlighted. The first tuple (red) represents the timber
harvest (per 1000 hectares) for Albania in 1950. The second tuple (blue) represents the timber harvest for Austria in 1950. (b)
An extracted relational table with the same two tuples highlighted as in Fig. 1a
tion. The spreadsheet author’s encoding, while perhaps eas-
ier to read, makes this task a challenge. The first thought
of such a programmer might be to convert the data into a
form better suited to performing the computation, like the
relational table shown in Fig. 1(b). One approach would be
to use a scripting language like Perl or Visual Basic to de-
fine regular expressions that would match the elements in
each column. For example, one could match country names
with an alphanumeric pattern, years with 4-digit patterns,
etc. Having done this, matches would be spatially collated
to form tuples, and tuples collated to form a table. We show
one such program in Fig. ??.
Problem Statement The problem that we address in this
paper is how to enable ordinary spreadsheet users, who do
not have programming skills, to convert ad hoc data for-
mats into relational ones. The strategy we use to achieve
this goal has two parts. 1) We present a domain-specific lan-
guage (DSL) called FLARE for extracting relevant data from
spreadsheets in a relational format. 2) We also present an
algorithm called FLASHRELATE that automatically gener-
ates FLARE programs from a small number of user-provided
positive and negative examples of tuples in the desired out-
put table, greatly simplifying the process of automated data
extraction.
FLARE Query Language FLARE describes the regular ge-
ometric structure of ad-hoc encodings to map spreadsheet
data into relational tables. The design of FLARE is inspired
by scripting languages with regular expression capabilities,
which have enabled developers with to extract relational data
from text files, such as server logs. Spreadsheets represent
another major source of semi-structured data. Without sup-
porting code, regular expressions and other string-matching
tools are not expressive enough to capture relational in-
formation encoded in spreadsheets. These structures, such
as hierarchical data, become complex geometric structures
when projected into a two-dimensional grid.
FLARE converts ad hoc stuctures into relational ones
so that relational tools can use them. FLARE declaratively
specifies the structure of ad-hoc encodings in the form of
constraints. Data that matches these constraints are automat-
ically converted into relational tables.
FLARE has two kinds of constraints. Constraints over
the text within a spreadsheet cell are referred to as cell
constraints and are composed of regular expressions. Cell
constraints represent valid classes of values in a relational
table, i.e., a relational column. Constraints between cells
are referred to as spatial constraints and are composed of
geometric relationships. Spatial constraints represent valid
geometric relationships between values that belong in the
same relational tuple.
Taken together, these two kinds of constraints form a di-
rected constraint graph over the spreadsheet. Vertices consist
of cell constraints while edges consist of spatial constraints.
The cells matched by a traversal of this graph produce a set
of relational tuples in the desired output table. We show a
sample FLARE query and corresponding constraint graph in
Fig. 3. Intuitively, one can think of this graph as an invariant
geometric structure that, when translated over a spreadsheet,
indicates which cells form a relational tuple.
FLASHRELATE Synthesis Algorithm Programmatic so-
lutions to data extraction suffer two key limitations. First,
the expertise required to use these tools is often particular
to specific document types. Second, and more significantly,
they require knowledge of programming. The first aspect
creates challenges even for programmers, while the second
aspect puts these solutions out of reach of the vast majority
of end users. As a result, users are either unable to leverage
access to rich data or have to resort to manual copy-and-
paste, which is both time-consuming and error-prone.
FLASHRELATE is a complementary technology that
bridges the expertise gap between ordinary end-users and
sophisticated new query languages like FLARE. FLASHRE-
LATE infers the correct set of constraints from a small num-
ber of examples given by the user and outputs an appropriate
FLARE program.
Example 1: Returning to our example in Fig. 1, we show
how a FLARE program can concisely extract the neces-
sary relational table. Recall that the user would like to
FLASHRELATE 2 2014/4/23
Fun ctio n Extract () As Colle ctio n
...
Set T uples = New Col lecti on ’ R e s ults
rYear . Pattern = " ^1 9[0 -9]{2} $ " ’ Y ear P att .
rValue . Patt ern = " ^[0 -9]+ $" ’ V a lue P att .
’ S e arch f or T u ples
For Each ws In Wor kshee ts
For Each cell In ws. Use dRang e
x = cell . Column
y = cell . Row
x_rt = x + 1
If rYear . Test ( cell . Value ) _
And r Value . Test (_
ws . Cells (y , x_rt ). Value ) Then
Dim tup leCoor ds
tupl eCoor ds = Array ( ws . Index , x , _
y , x_rt , y )
Tuples . Add ( cel lCoor ds )
End If
Next
Next
Ext ract = Tu ples
End Functio n
Figure 2: A Visual Basic program that performs the desired
extraction in Example 1. Variable declarations were omitted
for space reasons. The equivalent FLARE program, shown
in Fig. 3a, declaratively specifies the extraction and is much
simpler.
compute the average timber harvest for 1950. The FLARE
program shown in Figure 3 performs this extraction. Once
the data is in the desired form, the desired result can be
computed trivially with the following SQL query: SELECT
AVG(column 1) FROM FlareTable WHERE column 2 =
1950.
Despite the difficulty of computing the result from the
original structure, a typical person would have no trouble
understanding the spreadsheet. Numerous geometric cues
guide a person’s eye to the right location. For example,
timber harvest values are always located under a heading
titled “value.” Year values are always located to the right
of the timber value. Country names are always located to
the far left. Although other geometric information may be
used to perform the same task, these three invariants are
sufficient to extract the desired tuple. FLARE makes use of
these intuitive geometric concepts to concisely express the
desired extraction.
In Figure 3(a), Node constraints identify the two columns
in the desired relation, (1) the value, and (2) the year, labeled
with column IDs 1 and 2, respectively. Node constraints
are based on regular expressions. The first Node constraint
includes an extra contextual constraint, called an anchor,
that requires the presence of a second, contextual cell. In this
program, that additional cell must contain the string “value”
somewhere above Node 1 in the input spreadsheet.
Note that Node 2 is a strict superset of Node 1. How then,
are “value” cells to be distinguished from “year” cells? Edge
Node(1, “^[0-9]+$”, Anchor(“value”, Vert(*), Horiz(0)))
Node(2, “^[0-9]+$”, ⊥)
Edge (1, 2, Vert(0), Horiz(1), Select(All, All))
(a)
2 1
*
(b)
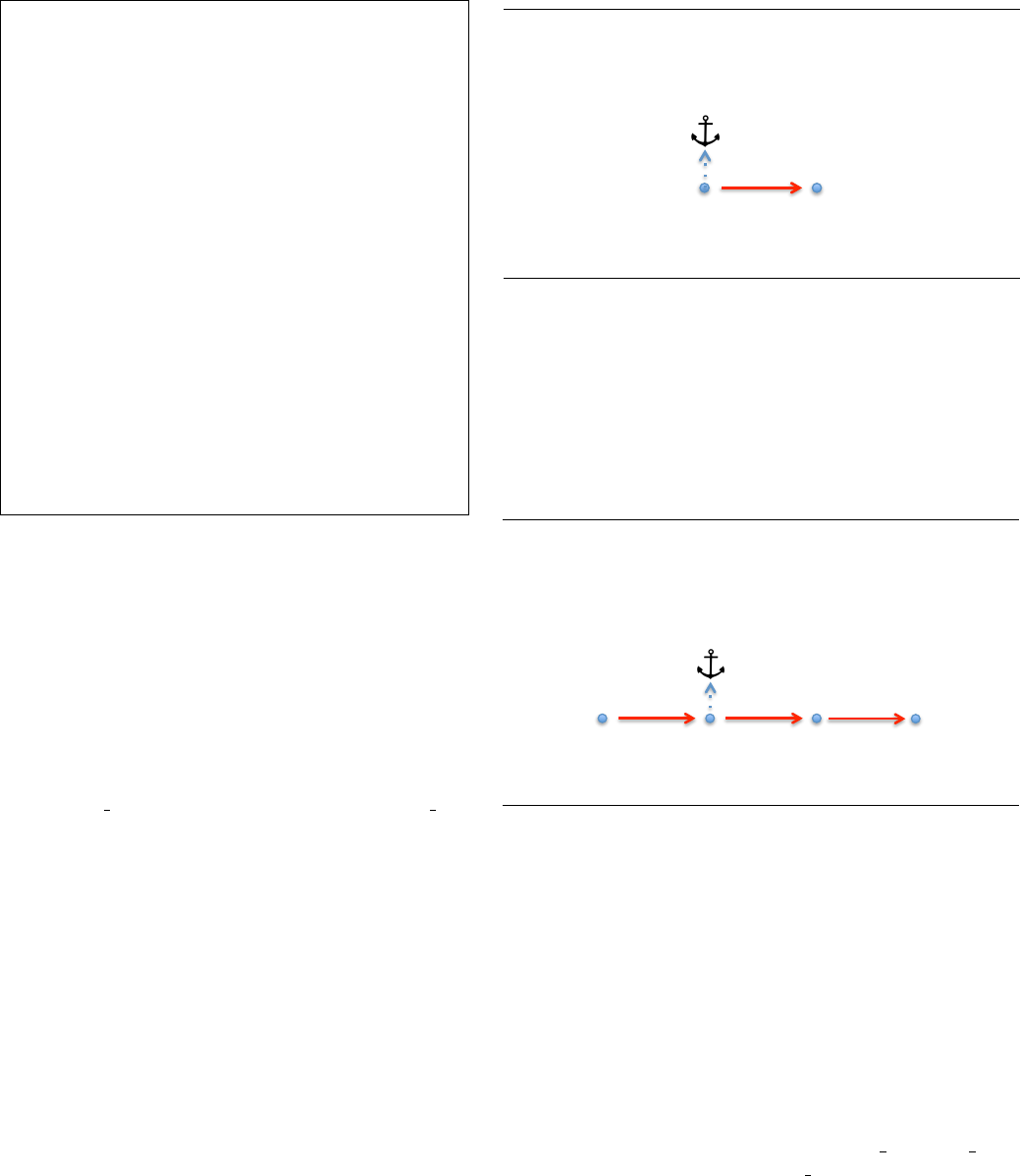
Figure 3: (a) FLARE program for first example extraction
task with (b) schematic illustration. Node constraints are
shown as dots, Edge constraints are shown as solid arrows,
and Anchor constraints are shown with a dashed arrow and
anchor symbol. Edge s and Anchors of non-constant length
are labeled with a Kleene star. Node numbers correspond to
attribute IDs in the desired relational tuple.
Node(3, “^[a-zA-Z ]+$”, ⊥)
Node(4, “^[a-zA-Z ]+$”, ⊥)
Edge (3, 1, Vert(0), Horiz(*), Select(All, All))
Edge (2, 4, Vert(0), Horiz(*), Select(All, All))
(a)
2 1 3
*
*
*
4
(b)
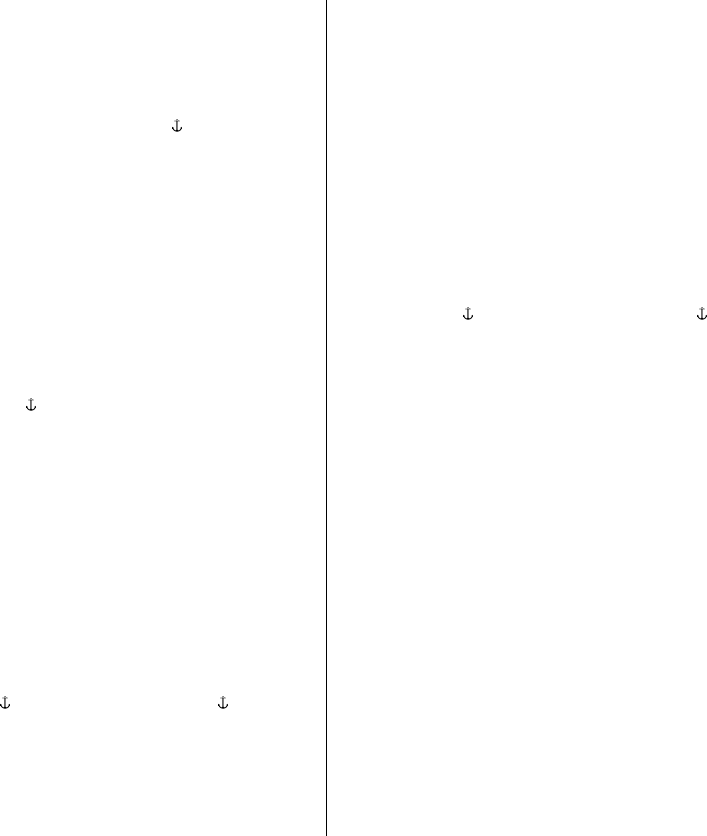
Figure 4: (a) A set of additional constraints added to Fig-
ure 3a; (b) schematic illustration.
constraints provide the additional context required by de-
scribing the spatial relationships between Nodes. Year values
must be one cell to the right of harvest values.
Example 2: Another task might be to find comments for
countries reporting harvests after 1960. This new extraction,
displayed as a set of additional constraints appended to our
original program, is shown in Figure 4. The extracted table
corresponds to the one shown in Fig. 1b. The task can be
completed by running the following SQL query against the
extracted table: SELECT DISTINCT column 3,column 4
FROM FlareTable WHERE column 2 > 1960.
Contributions This paper makes the following contribu-
tions:
•
We describe a domain-specific query language, FLARE,
that allows extraction of relational data from two-dimensional
semi-structured spreadsheets (see §3 ). FLARE is the first
pattern-based spatial query language explicitly designed
to extract relational data from spreadsheets.
FLASHRELATE 3 2014/4/23
•
We present an algorithm, FLASHRELATE, that syn-
thesizes FLARE programs given a small number of
user-provided positive and negative examples (see §4 ).
FLASHRELATE’s effectiveness (in speed and number of
required examples) is dictated by its efficient constraint
search.
•
We empirically evaluate the expressiveness of the FLARE
and the effectiveness of FLASHRELATE against a set
of 43 real-world spreadsheets drawn from the EUSES
corpus and from Excel user help forums [11, 16]. We
show that the FLASHRELATE algorithm is able to syn-
thesize correct FLARE programs from examples in all but
one case. Only a small number of examples are required
(see §5 ). FLASHRELATE rarely takes longer than 2 sec-
onds.
2. Related Work
Much recent research considers the problem of extract-
ing structured data from unstructured or semi-structured
sources, including documents on the web (e.g, [4, 9, 21, 22]).
Extracting Data from the Web Another important related
body of work focuses on extracting relational data from data
on the web. SXPath [22] is a query language, like FLARE,
that uses a combination of spatial relations and path expres-
sions to extract data from complex web documents. SXPath
uses intuitive spatial relations in describing patterns to avoid
queries that involve complex, non-intuitive deep path ex-
pressions. SXPath, like FLARE, includes spatial primitives
in its queries, but does not attempt to synthesize programs
in the query language from examples, as we do. SILA [21]
defines a spatial DOM abstraction (PDOM) and proposes
an algorithm for automatically extracting data records from
deep web pages based on the PDOM. While, like FLASHRE-
LATE, SILA attempts to extract records from spatially struc-
tured data, it does so algorithmically, and not by defining a
domain-specific query language. For overviews of the range
of approaches taken to web data extraction, see Ferrera et
al. [9] and Cafarella et al. [4]
Extracting Data from Spreadsheets The research most
closely related to FLASHRELATE is the concurrently-
developed SENBAZURU project, which, like FLASHRE-
LATE, seeks to extract relational data from spreadsheets [5,
6]. While the project goals are similar, the approach taken
by FLASHRELATE is very different. SENBAZURU attempts
to automatically infer hierarchical structure in spreadsheets
by creating a classifier that identifies data frames in the docu-
ment and another classifier that infers the intended hierarchy
based on a set of predefined features. In contrast, FLASHRE-
LATE uses positive and negative output examples to synthe-
size a program in a domain-specific language of our own
design. FLASHRELATE can be used to perform arbitrary ex-
traction tasks from arbitrary spreadsheets, provided that reg-
ular syntactic and spatial structure is present.
Cunha et al. [7] also consider extracting relational data
from spreadsheets, but their focus is on recovering the true
relational schema from the spreadsheet data. We believe that
a user might have in mind many different task-dependent
schemas for a single spreadsheet, as the example in the
introduction illustrates. Instead, FLASHRELATE crafts an
extraction program that returns precisely those tuples that
the user wants based a set of user-supplied examples.
Query Synthesis by Examples The view synthesis prob-
lem [8, 26] aims to find the most succinct and accurate query
for a given database view. There are two key differences with
our work: (i) View synthesis techniques infer a relation from
multiple single-dimensional relational tables, while we in-
fer a relation from a single, two-dimensional semi-structured
spreadsheet. Such spreadsheets are often used to encode
multiple dimensions in ad-hoc ways. (ii) View synthesis
techniques infer a relation from a large representative exam-
ple view, while we infer a transformation from a set of few
example rows, an important usability aspect for end-users.
Programming by Examples The area of programming by
examples [18] (PBE) is gaining renewed interest [14] be-
cause of its revolutionary potential to enhance productiv-
ity of millions of end-users. Gulwani et al. have developed
programming-by-example techniques for automating repet-
itive data manipulation tasks related to structured spread-
sheet tables [15]. These include syntactic string transforma-
tions [13], semantic string transformations [25], and table
layout transformations [16]. Of these, the most closely re-
lated work is that of [16]. The following are some key dif-
ferences with our work: (i) We address a different class of
spreadsheet tasks, namely transforming semi-structured data
into structured relational data. (This facilitates application of
prior work on manipulating structured relational data using
input-output examples.) For instance, [16] cannot handle any
of the transformation tasks associated with our new bench-
mark examples. (ii) The synthesis techniques used are com-
pletely different. Prior work uses a class of techniques called
version-space algebras, while we perform heuristic search.
(iii) The user interaction is quite different. Prior work takes
as input multiple input-output examples, while our technique
takes as input multiple positive/negative examples of tuples
in the desired output table.
Quicksilver [19] is another recent PBE technology for
structured relational data. It synthesizes relational algebra
queries over strictly relational tables, while we focus on a
different class of spreadsheet tasks, namely extracting rela-
tional tuples from semi-structured spreadsheets. QuickSil-
ver cannot handle any of the transformation tasks associated
with our benchmark examples.
Manipulation of Semi-Structured Data The PADS project
simplifies ad hoc data-processing tasks for programmers by
developing domain-specific languages for describing data
formats in text files and learning algorithms for inferring
FLASHRELATE 4 2014/4/23

such formats using annotations [10]. The learned format can
then be used by programmers to implement custom data-
analysis tools. PADS focuses on parsing and manipulating
semi-structured data in text files or log files while we focus
on semi-structured data in spreadsheets.
Learning Theory Angluin presented a classical algorithm
for learning regular expressions or finite state automatas
from positive and negative examples [2]—an equivalence
oracle produces a counterexample that exhibits disequiva-
lence of the current hypothesis with the intended one, and
a membership oracle labels that counterexample as either
positive or negative. Our work learns a more sophisticated
concept, namely a two-dimensional query involving regular
expressions from positive/negative examples. In our case, it
is the end-user who plays the role of both equivalence and
membership oracles, providing a positive or negative tuple
row(s) in each interaction.
Two-Dimensional Grammars The formal methods com-
munity has done a lot of work on defining picture gram-
mars [12, 23], which extend classical grammars for gen-
erating strings into two-dimensional space, using concepts
like two-dimensional regular expressions [3, 20] and au-
tomata [17]. These works focus on theoretical analysis
of two-dimensional grammars, specifically decidability and
complexity of classical problems for these novel languages.
In contrast, a FLARE program is specifically designed for
matching relational tuples. Furthermore, we address the
problem of synthesizing the desired program from few posi-
tive/negative examples.
Header Inference [1] describes a system that automati-
cally infers header information in spreadsheets by exploiting
special layout or formatting attributes, such as sub-headers,
footers, filler cells (blank cells or cells with some special
characters to aid visual readability of table content). Our
work also leverages the presence of such layout or format-
ting constraints in spreadsheets; however our use of this in-
formation is not heuristic in nature—users provide examples
for tuple extraction and we learn a specific pattern-based log-
ical query for accomplishing the intended task.
3. Flare Language
The goal of a FLARE program is to transform a semi-
structured spreadsheet I into an n-ary relational table. The
syntax and formal semantics of FLARE are shown in Fig. 5.
A spreadsheet I is a two-dimensional collection of strings.
A cell c is a pair of x and y coordinates that can be used
to index I (as in I[c]). We use the term Cells(I) to de-
note all cells in the used range of the spreadsheet I. An
n-ary relational table is a set of n-ary tuples of strings.
Each such tuple can also be represented as a map from tu-
ple attribute indices {1, . . . , n} to spreadsheet strings (as in
{1 7→ s
1
, 2 7→ s
2
, . . . , n 7→ s
n
}).
A FLARE program ρ consists of a set of n nodes and a
set of directed edges that form a tree shape. These nodes and
edges are labeled with descriptions that form the criteria for
extracting relational tuples from the input sheet. Each node
in P corresponds to a unique tuple attribute index i from the
output relational table. It is associated with a cell constraint
α (denoted by CellConstraint(i)) that is a Boolean con-
straint over spreadsheet cells. Each directed edge in P cor-
responds to an ordered pair of tuple attribute indices j and k
from the output relational table. Each such edge is associated
with two kinds of constraints: (a) a spatial constraint β (de-
noted by SpatialConstraint(j, k)), which is a Boolean
constraint over an ordered pair of spreadsheet cells and
checks horizontal/vertical orientation of the two cells. (b) a
select constraint γ (denoted by SelectConstraint(j, k)),
which filters a set of cells with respect to another cell based
on some distance related tags. We discuss the precise syntax
and semantics of these different kinds of constraints later in
this section. We use the term Root(ρ) to denote the tuple
attribute index corresponding to the root node in the tree
structure formed by the nodes and edges in ρ.
In order to define a constructive semantics for a FLARE
program ρ, we introduce a recursive function F (j, k, c) that
takes as input an edge identifier (i.e., a pair of tuple attribute
indices j and k) and a cell c and returns a set of m-tuples,
where m is the number of nodes reachable from the corre-
sponding edge.
F (j, k, c) is computed in three steps: (i) Compute the set
C
0
of all cells that simultaneously satisfy both the spatial
relationship to c with SpatialConstraint(j, k) and the
cell pattern CellConstraint(k). (ii) Filter C
0
to that subset
C
00
that satisfies the SelectConstraint(j, k) relationship
with c. (iii) For each c
00
∈ C
00
, compute the cross product
of singleton c
00
with the result of the recursive invocation of
F along each outgoing edge from nodes with tuple attribute
index k and cell c
00
(i.e., F (k, k
i
, c
00
), where k
i
belongs to
the set of children of node k (denoted by Children(ρ, k))),
and return their union.
The execution of a program ρ on an input spreadsheet
I proceeds as follows: (i) Compute the set C of all cells
that satisfy the cell constraint CellConstraint(`), where
` is the tuple attribute index associated with the root node of
program- ρ. (ii) For each c ∈ C, compute the cross product
of singleton c with the result of recursive invocations of F
along the outgoing edges from the root node and cell c (i.e.,
F (`, k
i
, c)), and return their union.
A cell constraint Cell(r, ) consists of a regular expres-
sion r, namely a Boolean constraint over strings, and an an-
chor constraint , namely a Boolean constraint over cells.
An anchor constraint Anchor(r,β), which consists of a reg-
ular expression r and a spatial constraint β, asserts that there
exists a cell c
0
whose content matches r and that is related
to the argument cell using the spatial constraint β. Anchor
constraints can be thought of as a special case of the spatial
FLASHRELATE 5 2014/4/23
Program ρ := {N
i
}
i
∪ {E
i
}
i
Node N := Node(j, α)
Edge E := Edge(j, k, β, γ)
Cell Constraint α := Cell(r, )
Spatial Constraint β := Spatial(v,h)
Vertical Constraint v := Vert(q)
>
Horiz. Constraint h := Horiz(q)
>
Quantity q := . . .
-2
-1
0
1
2
. . .
- ∗
∗
Select Constraint γ := Select(T
1
, T
2
)
Type T := All
NearX
NearY
FarX
FarY
Anchor Constraint := Anchor(r,β)
⊥
(a)
Cell: (N, N)
Spreadsheet: Cell → String
Program: Spreadsheet → n-tuple set
Cell/Anchor Constraint: Cell → Bool
Spatial/Vert/Horiz Constraint: (Cell, Cell) → Bool
Select Constraint: (Cell, Cell set) → Cell set
(b)
Node(j, r, ) ≡ Node(j, Cell(r, ))
Edge(j, k, v, h, γ) ≡ Edge(j, k, Spatial(v, h), γ)
Anchor(r, v, h) ≡ Anchor(r, Spatial(v, h))
All ≡ Select(All, All)
(c)
[[ρ]] I = {{(` 7→ I[c])} ∪ σ
1
∪ . . . ∪ σ
d
| c ∈ C, σ
i
∈ F (`, k
i
, c)}
where C = {c | [[α]] c, c ∈ Cells(I)}, ` = Root(ρ)
α = CellConstraint(`), {k
1
, . . . , k
d
} = Children(ρ, `)
F (j, k, c) = {{(k 7→ I[c
00
])} ∪ σ
1
∪ . . . ∪ σ
d
| c
00
∈ C
00
, σ
i
∈ F (k, k
i
, c
00
)}
where C
00
= [[γ]] (c, C
0
), C
0
= {c
0
| [[β]] (c, c
0
) ∧ [[α]] c
0
},
α = CellConstraint(k), β = SpatialConstraint(j, k)
γ = SelectConstraint(j, k), {k
1
, . . . , k
d
} = Children(ρ, k)
[[Cell(r, )]] (I, c) = [[r]] I[c] ∧ [[ ]] (I, c)
[[Spatial(v, h)]] (c, c
0
) = [[v]] (c, c
0
) ∧ [[h]] (c, c
0
)
[[Horiz(q)]] ( c, c
0
) = (fst(c) − fst(c
0
)) ∈ Range(q)
[[Vert(q)]] ( c, c
0
) = (snd(c) − snd(c
0
)) ∈ Range(q)
where Range(-∗) = {−1, −2, −3, . . .}
Range(∗) = {1, 2, 3, . . .}
Range(i) = {i}
[[>]] (c, c
0
) = true
[[Select(T
1
, T
2
)]] (c, C) = [[T
2
]] (c, [[T
1
]] (c, C))
[[All]] (c, C) = C
[[NearX]] (c, C) = argmin
c
0
∈C
|fst(c) − fst(c
0
)|
[[Anchor(r,β)]] I, c = ∃c
0
([[r]] I[c
0
] ∧ [[β]] (c, c
0
))
[[⊥]] (I, c) = true
[[r]] s = true iff regular expression r
matches string s
(d)
Figure 5: (a) Syntax and (b) types of a FLARE program ρ. We refer to ∗ as a Kleene star. (c) For notational convenience, we use
the shorthand syntax on the left to denote the expressions on the right. (d) Semantics of a FLARE program ρ on spreadsheet I.
x, y, and z are Coordinates. c is a Cell. C is a set of Cells. a and b are integers, and v is a Boolean.
and cell constraints. Anchor constraints serve as a Boolean
predicate but do not extract a column in the output tuple.
A spatial constraint Spatial(v, h) consists of a pair of
constraints: a vertical constraint v, and a horizontal con-
straint h. Both forms are Boolean constraints over a pair of
cells and check whether the two cells have the specified ver-
tical and horizontal orientation, respectively. Both forms are
parameterized by a quantity argument q. Kleene (“*”) quan-
tities can match any cell in a particular direction, whereas
constant quantities only match cells in a particular location.
The select constraint γ consists of a pair of enumerated
Type tags that control the behavior of Kleene quantities.
A tag Type is either All, NearX, NearY, FarX, or FarY,
each of which is a filter over a set of cells C with respect to
another cell c. In particular, the tag NearX selects those cells
from C that have the shortest horizontal distance from the
cell c. Other tags are defined similarly. A select constraint
will typically contain at most one constraint in each direction
(i.e., at most one of NearX and FarX, and at most one of
NearY and FarY).
3.1 Program Execution
In this section, we walk through the execution of a FLARE
program and discuss our early experience writing programs
for extracting data from spreadsheets. Because FLARE
builds on regular expressions, the additional concepts we
present are relatively easy to learn.
For our example, we return to the input spreadsheet
shown in Fig. 1a and the desired relational table output
FLASHRELATE 6 2014/4/23
Node(1,“^[a-zA-Z ]+$”,⊥)
Node(2,“^[0-9]+$”,Anchor(“value”,Vert( ∗ ),>))
Node(3,“^19[0-9]2$”,⊥)
Node(4,“^(FRA [1-3]|NC|)$”,
Anchor(“Comments”,Vert( ∗ ),>))
Edge(1,2,Vert(0),Horiz( ∗ ),Select(All, All))
Edge(2,3,Vert(0),Horiz(1),Select(All, All))
Edge(3,4,Vert(0),Horiz( ∗ ),Select(All, All))
(a) Shown as a FLARE program.
3 2 1
* * *
4
*
(b) Shown as a tree.
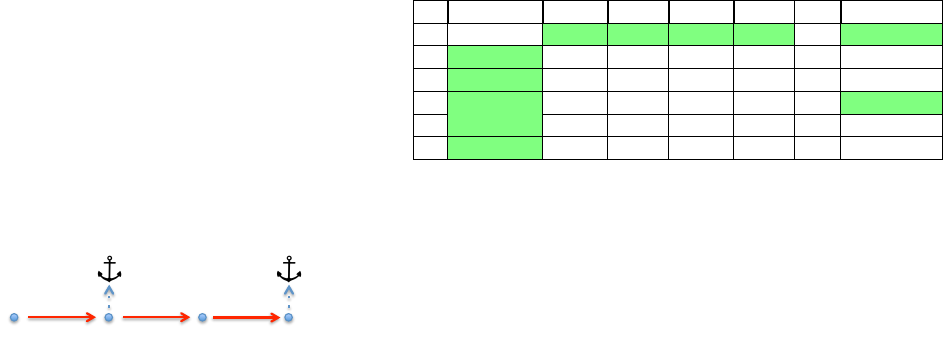
Figure 6: The program for the running example.
shown in Fig. 1b. A FLARE program that accomplishes this
is shown in Fig. 6a and is illustrated schematically in Fig. 6b.
The output of a FLARE program should be thought of
as the simultaneous solution of its set of constraints on
a spreadsheet, however an operational description of the
interpreter helps to further understanding.
FLARE programs must be tree-shaped and all nodes must
be reachable via directed links from the root. This formal-
ism makes the recursive execution procedure described ear-
lier well defined. Every node except the root node is paired
with one edge for which that node is the destination. Each
node corresponds a constraint over the contents of cells in
a column of the desired relational table. Each edge corre-
sponds to a spatial relationship between the cells of two out-
put columns. The interpreter loop processes each of these
constraint pairs starting from the tree root’s cell constraint.
When evaluating the root constraint, all cells in the spread-
sheet are considered. Cells filtered by the root constraint are
candidates for inclusion in the root column (which is not
necessarily the first column). Note that inclusion of a cell
in the final output is predicated on all subsequent constraints
for each cell being met.
For subsequent nodes and edges, the interpreter recur-
sively returns a new set of cells satisfying each additional
constraint pair. The result become candidates for the at-
tribute named by the constraint pair’s ID.
In our example, the following root node is first evaluated.
Node(1,“^[a-zA-Z ]+$”,⊥)
The cell constraint filters the entire input spreadsheet by
applying the regular expression, ^[a-zA-Z ]+$, and then
by ensuring that all cells that match the expression also
have neighbors that satisfy the anchor expression, ⊥. The ⊥
anchor is a special case meaning that no anchor expression
is given, thus evaluating the ⊥ anchor for any cell in any
spreadsheet always returns true. After evaluating the root
A B C D E . . . R
1 value year value year Comments
2 Albania 1,000 1950 930 1981 FRA 1
3 Austria 3,139 1951 3,177 1955 FRA 3
4 Belgium 541 1947 601 1950
5 Bulgaria 2,964 1947 3,259 1958 FRA 1
6 Czech . . . 2,416 1950 2,503 1960 NC
. . .
Figure 7: The set of cells (highlighted) from I that satisfy
the root constraint in the running example.
node, the output column with attribute ID 1 contains the
cells highlighted in Fig. 7. Our intent was to select the cells
belonging to the first column, i.e., country names. Clearly,
this constraint is insufficiently precise; however, additional
constraints will eliminate these unwanted cells.
The cell constraint for column 2 includes an anchor in
addition to its regular expression:
Node(2,“^[0-9]+$”,Anchor(“value”,Vert( ∗ ),>))
First, cells that do not match “^[0-9]+$” are eliminated
(note that FLARE matches regular expressions against the
raw text values in a spreadsheet before Excel’s formatting
rules are applied). Next, only the cells that satisfy the an-
chor predicate are returned. This anchor states that a cell
containing the text “value” must appear somewhere above
the match.
The following edge joins columns 1 and 2:
Edge(1,2,Vert(0),Horiz( ∗ ),All)
The spatial constraint states that cells identified by the
cell constraint for attribute 2 must be anywhere to the right
and not above or below the cells identified by the cell con-
straint for attribute 1. This eliminates the unwanted cells for
attribute 1 described earlier.
The interpreter processes all remaining constraints in the
same manner. Every parent cell in the program tree is joined
with each of its child cells, thus yielding a relational n-tuple.
This program yields the output shown in Fig. 1b.
The worst-case complexity of a FLARE program, in terms
of the number of cells, n, and number of columns, c, is
O(n
c
), when all edges use Kleene stars. In practice, com-
plexity is low. Tuples with very large numbers of columns
are rare. Encodings rarely require only variable-length com-
ponents. Lastly, the FLARE interpreter can search all alter-
natives efficiently in parallel, since extraction operations can
be expressed as pure functions on an immutable grid. As
a point of reference, the FLARE synthesizer may call the
FLARE runtime many thousands of times during its opera-
tion. As we show in §5 , FLASHRELATE is nonetheless quite
fast.
4. FlashRelate Synthesis Algorithm
The goal of the FLASHRELATE algorithm, shown in
Fig. 8a-e, is to generate a FLARE program that is consis-
tent with the positive and negative examples supplied by
FLASHRELATE 7 2014/4/23
SYNTH(I, P, N)
1 for each column index i
2 AN [i] = LearnN (I, P, i)
3 for each pair of column indices i, j such that i 6= j
4 AE[i, j] = LearnE(I, P, i, j)
5 return SEARCH(∅, N, AN , AE)
(a)
SEARCH(C
P
, N, AN , AE)
1 if |C
P
| = NUMCOLS
2 if
S
(α,β)∈C
P
Negate(α) ∪ Negate(β) = N
3 return C
P
4 else return FAILURE
5 else
6 C
E
= {E | E ∈ C
P
}
7 pairs = {(N , E) | N ∈ AN [i], E ∈ AE[i, j]
s.t. G
0
= (V, C
E
∪ {E}) is loop-free
and i, j ∈ [1 . . . NUMCOLS]}
8 pairs
0
= RANKP(pairs)
9 k = 0
10 while k < |pairs
0
|
11 C
0
P
= SEARCH(C
P
∪ {pairs
0
[k]}, N)
12 if C
0
P
= FAILURE
13 k = k + 1
14 else
15 return C
0
P
16 return FAILURE
(b)
LEARNN (I, P, i)
1 A = set of predefined constraints
2 AN = ∅
3 for each constraint α ∈ A
4 if ∀ tuples p ∈ P, [[α]] (I, p[i]) = true
5 AN = AN ∪ {Node(i, α)}
6 return AN
(c)
LEARNE(I, P, i, j)
1 AE = ∅
2 V = LEARNQUANT(I, P, i, j, TRUE)
3 H = LEARNQUANT(I, P, i, j, FALSE)
4 for each {v, h | v ∈ V, h ∈ H}
5 β = Spatial(v,h)
6 for each γ ∈ ENUMSELECT
7 AE = AE ∪ {Edge(i,j,β,γ)}
8 return AE
(d)
LEARNQUANT(I, P, i, j, vert)
1 ∆ = ∅
2 Q = ∅
3 λ = Vert if vert otherwise Horiz
4 φ = snd if vert otherwise fst
5 for each p ∈ P
6 ∆ = ∆ ∪ {λ(φ(p[j]) − φ(p[i]))}
7 if ∀δ
1
, δ
2
∈ ∆, δ
1
= δ
2
8 Q = any δ ∈ ∆
9 if ∀δ ∈ ∆, δ ≥ 0
10 Q = Q ∪ {λ(∗)}
11 else if ∀δ ∈ ∆, δ ≤ 0
12 Q = Q ∪ {λ(−∗)}
13 else return FAILURE
14 return Q
(e)
Figure 8: FLASHRELATE’s program synthesis procedures. (a) is the top-level procedure. (b) is the program search procedure.
(c) is a subroutine for learning node constraints from positive examples. (d) is a subroutine for learning edge constraints from
positive examples. ENUMSELECT is a macro that enumerates the set of all possible select constraints. (e) learns the direction
and amount of spacing between examples.
the user. A FLARE program is a set of cell and spatial con-
straints, which as we described earlier, represent vertices
and edges in a constraint graph. We thus frame the prob-
lem of finding a correct program as a search over all valid
sets of these constraints that satisfy the positive and negative
examples.
While FLARE can produce programs that represent arbi-
trary disconnected directed acyclic graphs (DAGs), we limit
the FLASHRELATE’s capabilities to producing connected di-
rected trees. We do this for two reasons: 1) all of the encod-
ings that we have examined thus far can be encoded in the
tree-shaped subset of FLARE, and 2) this formulation allows
us to reduce the problem of finding a satisfying program to
that of finding a spanning tree. Thus FLASHRELATE’s pro-
gram search procedure, shown in Fig. 8b, is modeled on a
recursive formulation of Kruskal’s spanning tree algorithm.
We also employ a number of heuristics in FLASHRE-
LATE. Note that there may be many constraint graphs that
satisfy the examples given by the user. While all of these
programs are correct with respect to the user’s examples,
not all of them are what the user wants. Inferring user de-
sires from incomplete specifications is a difficult problem.
Our heuristics are thus employed to accomplish two goals:
1) they guide the search toward constraints more likely to be
created by users, and 2) speed the search by
4.1 Definitions
We use the following terms in Fig. 8. Let P be a set of user-
provided tuples representing desired program outputs, from
FLASHRELATE 8 2014/4/23

this point on referred to as positive examples. Let N be a
set of user-provided tuples representing undesired program
outputs, from this point on referred to as negative examples.
NUMCOLS is defined as the number of attributes in a tuple
in P .
Let V be the set of attribute IDs, where each ID represents
a position in the desired relational output tuple in P . Let E
be the complete set of directed edges, each edge referred
to by a pair of attribute IDs (i, j). Let G = (V, E) be the
complete digraph over the attributes in P . The following
two expressions also signify a shorthand for the negative
tuples excluded by a cell constraint and spatial constraint,
respectively:
Negate(α) ≡ {n ∈ N | n /∈ [[α]] (I, c), ∀c ∈ I}
Negate(β) ≡ {n ∈ N | n /∈ [[β]] (c, c
0
), ∀c, c
0
∈ I, c 6= c
0
}
4.2 Algorithm
Informally, the synthesizer must perform the following
tasks, given P and N:
1. Using positive examples, determine which cell con-
straints are possible (Fig. 8c). See §4.2.1 .
2. Using positive examples, determine which spatial con-
straints are possible (Fig. 8d). See §4.2.2 .
3. Identify a combination of cell and spatial constraints that
excludes all negative examples (Fig. 8b). See §4.2.3 .
We discuss a number of implementation details that make
FLASHRELATE’s search procdure efficient in §4.2.4 .
Example We discuss a single round of synthesis using the
algorithm shown in Fig. 8 by way of a running example, the
spreadsheet shown in Fig. 9a. The desired relational output
is shown in Fig. 9b.
FLASHRELATE is intended to be used in the following
interactive manner:
1. The user calls FLASHRELATE with a sample tuple (a
positive example) from the desired relation over data in
the spreadsheet. FLASHRELATE returns a program to the
user.
2. If the program extracts the relational table that the user
wanted, the user is done. Otherwise, the user points out a
discrepancy between the extracted table and the intended
table with one of the following actions:
•
If the extracted table is missing a tuple, the user pro-
vides a new positive example and calls FLASHRE-
LATE again (step 2).
•
If the extracted table contains an undesired tuple,
the user provides a new negative example and calls
FLASHRELATE again (step 2).
Note that while users must provide at least one new posi-
tive or negative example during each round of the procedure
described above for the algorithm to synthesize an improved
FLARE program, they are not limited to providing only a sin-
gle new example.
Suppose our user starts the process by providing the fol-
lowing positive example to the synthesizer, the first tuple in
the desired table:
Deerfield 130 Central St. Joe M.
Note that this positive example also encodes the follow-
ing information, a map from each tuple attribute index to
spreadsheet coordinates.
1 −→ (1, 2) 2 −→ (2, 2) 3 −→ (3, 2)
FLASHRELATE uses both representations. The first rep-
resentation describes the contents of a tuple; the second rep-
resentation describes the spatial relationships between at-
tributes in a tuple.
4.2.1 Step 1: Determine cell constraints
The FLASHRELATE synthesizer constructs cell constraints
from regular expressions. A regular expression comes from
one of two places: 1) it is dynamically constructed from a
small set of standard character class tokens (EmptyCellTok,
WhiteSpaceTok, AlphaTok, NumTok, and PunctTok), or
2) it comes from a small collection of commonly occurring
string patterns that we identified while studying spreadsheets
in the EUSES corpus. This strategy has been used by oth-
ers [13] in research for learning string programs.
Regular expression learning algorithms are outside the
scope of this paper, but the topic is well-studied [2]. Thus,
the primary focus in this paper is in learning geometric
patterns (see §4.2.2 ). FLASHRELATE is designed to work
with any learning procedure that can learn from a set of
positive string examples.
Since cell constraints may also include anchor con-
straints, we use the following simple anchor synthesis scheme.
Given a set of positive example cells for attribute i, the
anchor synthesizer searches each cell’s neighbors for a
similarly-located common string. If such a common neigh-
bor is discovered, an Anchor is added as a possibility for the
appropriate cell constraint. In practice, we find that empty
cells are frequently used as anchors by the synthesizer.
Line 1 in Fig. 8a calls LearnN (Fig. 8c) for each the set
of strings corresponding to each attribute ID i in the set of
positive examples. LearnN eliminates those constraints that
do not match all of the strings associated with i.
Returning to our example, if the synthesizer is given the
set of regular expressions shown in Fig. 10, LearnN returns
the constraints shown in Fig. 11.
4.2.2 Step 2: Determine spatial constraints
Line 3 in Fig. 8a calls LearnE (Fig. 8d) for each pair of
attribute indices (i, j) in P . LearnE finds all possible spatial
constraints that satisfy the observed spatial layout between
columns from positive examples.
For each positive example p, LearnE calculates the delta
for the cells (lines 2-3) p[i] and p[j]. Each delta is the dis-
tance in either the horizontal or vertical direction, expressed
as a number of cells, between p[i] and p[j].
FLASHRELATE 9 2014/4/23
1 2 3
1 Town Address Owner
2 Deerfield 130 Central St. Joe M.
3 10 Whately Ave. Mary L.
4 TOTAL 2
5 Amherst 10 North Pleasant St. Bob O.
6 55 Westman Lane Claudia S.
7 2 Rectangle Ct. Alyssa B.
8 TOTAL 3
9 Hadley 5 Rocky Rd. Greg S.
10 34 Godell Rd. Omar L.
11 TOTAL 2
1 2 3
1 Deerfield 130 Central St. Joe M.
2 Deerfield 10 Whately Ave. Mary L.
3 Amherst 10 North Pleasant St. Bob O.
4 Amherst 55 Westman Lane Claudia S.
5 Amherst 2 Rectangle Ct. Alyssa B.
6 Hadley 5 Rocky Rd. Greg S.
7 Hadley 34 Godell Rd. Omar L.
Figure 9: (a) An input spreadsheet. (b) The desired relational table. Note that missing fields have been inserted and headers and
summary rows have been removed.
^[0-9]+$ ^[a-z]+$
^[A-Z]+$ ^[A-Z][a-z]+$
^[0-9]+ [a-zA-Z. ]+$ ^[a-zA-Z. ]+$
Figure 10: The example uses the above set of regular expres-
sions.
{ Node(1, ^[A-Z][a-z]+$,⊥) }
{ Node(2, ^[0-9] [a-zA-Z. ]+$,⊥) }
{ Node(3, ^[a-zA-Z. ]+$,⊥) }
Figure 11: Candidate cell constraints after calling LearnN .
Edge(1, 2, Vert(0), Horiz(1)), Select(All, All))
Edge(1, 2, Vert(0), Horiz( ∗ )), Select(All, x))
Edge(1, 2, Vert( ∗ ), Horiz(1)), Select(y, All))
Edge(1, 2, Vert( ∗ ), Horiz( ∗ )), Select(y, x))
. . .
Figure 12: Candidate Edge constraints from the run-
ning example. Only the constraints for attribute pair
(1, 2) are shown, x ∈ {NearX, FarX, All}, and y ∈
{NearY, FarY, All} for space reasons.
Node(1, ^[A-Z][a-z]+$,⊥)
Node(2, ^[0-9] [a-zA-Z. ]+$,⊥)
Node(3, ^[a-zA-Z. ]+$,⊥)
Edge(1, 2, Vert(0), Horiz(1)), Select(All, All))
Edge(2, 3, Vert(0), Horiz(1)), Select(All, All))
Figure 13: The program synthesized given a single positive
example.
Deerfield 130 Central St. Joe M.
Amherst 10 North Pleasant St. Bob O.
Hadley 5 Rocky Rd. Greg S.
Figure 14: Program output after running the synthesis algo-
rithm with a single positive example.
Given the set of deltas derived from all the positive ex-
amples for i and j, the set falls into one of more of the fol-
lowing classes. We use delta class information when calling
Edge constructors to generate spatial constraints.
1. All the deltas represent a fixed distance, and the set of
deltas is a bijective relation from p[i] to p[j]. This class
produces constant-length quantity values for Vert() or
Horiz() constructors.
2. Delta distances vary, and the set of deltas is a bijective re-
lation from p[i] to p[j]. This class produces Kleene (“*”)
quantities for Vert() and Horiz() constructors and
“match-single” select type tags (NearX, FarX; NearY,
FarY).
3. Delta distances vary, and the set of deltas is not a bijec-
tive relation from p[i] to p[j]. Specifically, one or more
distinct p[i] maps to two or more p[j]. This class pro-
duces Kleene (“*”) quantities for Vert() and Horiz()
constructor and “match-all” select type tag (All).
We also use delta class information when pruning for
efficiency reasons (see 4.2.4, “Pruning”). The set of possible
spatial constraints inferred for ID pair (1, 2) for our single
positive example is shown in Fig. 12.
4.2.3 Step 3: Find a satisfying set of constraints
Next FLASHRELATE searches for a set of constraints that
satisfy its negative examples (Fig. 8a). As shown in Fig. 8b,
there are five essential steps in this recursive procedure:
1. Exclude (Node, Edge) constraint pairs that would intro-
duce a loop into the program graph given the current set
of chosen constraints (line 7).
2. Call RankP to rank constraint pairs (line 8). We discuss
RankP in §4.2.4 .
3. Choose a constraint pair (line 10).
4. Recursively choose the next pair of constraints (line 11).
5. If constraints have been found for all the attributes in
the relation, ensure that the program excludes all of the
negative examples (line 2) and return the program. If not,
backtrack (line 4).
We define here some additional terms used in Fig. 8.
Lines 6-16 represent the algorithm’s implementation of non-
deterministic choice. Each iteration of the while loop rep-
resents a choice point. C
E
denotes the a set of chosen edges
at a particular choice point. C
P
denotes the set of chosen
constraint pairs (α, β) at the same choice point where α is
FLASHRELATE 10 2014/4/23

a Node(j, r, ) constraint and β is an Edge(j, k, v, h, γ)
constraint. pairs denotes the set of all valid constraint pairs
at the same choice point.
The search space may contain numerous solutions. The
algorithm is free to choose any correct program that excludes
all of the negative examples. The implementation of RankP
determines which pair of constraints the search ultimately
chooses. We discuss these implementation choices in §4.2.4
.
In our example, suppose the synthesizer chooses the pro-
gram shown in Fig.13. Since, in our example, the user has
provided no negative examples, the chosen program trivially
satisfies the criteria on line 2 in Fig. 8. Were this not the
case, the search would backtrack and consider a different
constraint pair.
The output of this program is shown in Fig. 14. While all
of the extracted tuples are correct, the output is missing rows
with omitted towns in the original spreadsheet (Fig. 9a). The
user’s next step is to add another positive example (e.g., the
2
nd
tuple in Fig. 9b) and call the synthesis algorithm again
(Fig. 8a). This procedure continues until the user is satisfied
with the output of the algorithm. We omit these additional
user-interactions for brevity.
4.2.4 Implementation Details
The efficient operation of the synthesis algorithm depends
on three key implementation ideas:
1. Pruning of the search space, for efficient search.
2. Ranking schemes for synthesizer search choices.
3. Choice of data structures.
Pruning Constant-length spatial constraints can be ruled
out when the geometric form has been shown to vary. In our
example in Fig. 9, all Edge constraints containing Vert(0)
for (1, 2) can be ruled out because the cell in the second
column in the second tuple (“10 Whately Ave.”) is not a
constant-length distance vertically from the first cell (“Deer-
field”). In the first tuple, the vertical distance is zero; in the
second the distance is 1.
Match-single spatial constraints can also be ruled out in
some cases. In the same example mentioned above, it is
not possible for the Edge constraint for (1, 2) to contain a
Select() with the tags NearY or FarY. This is because it is
possible to match two different cells (“130 Central St.” and
“10 Whately Ave”) for attribute 2 from the starting cell for
attribute 1 (“Deerfield”).
Ranking FLASHRELATE often has a number of alterna-
tive constraints to choose. The balance of specific vs general
constraints is important because it impacts both the speed
of the synthesizer and the number of examples required by
the user. Favoring specific constraints may make the search
fast, because they are more likely to rule out negative exam-
ples. However, specific constraints may also mean that the
user must provide more positive examples before the correct
program is found. Conversely, favoring general constraints
may fail to exclude negative examples, causing the search
to backtrack frequently, resulting in a slow search. General
constraints may require a user to provide more negative ex-
amples.
We tend to favor more specific programs over more gen-
eral programs. This enables users to focus on what they
want, instead of what they don’t want, which we believe to
be more natural. This design choice also allows for faster
search. We rank constraint pairs by the following schemes,
in this order:
1. R1 Constraints that exclude large numbers of negative
examples are favored over constraints that exclude few.
This scheme ensures that the search favors constraints
that exclude negative examples.
2. R2 Specific spatial constraints are favored over general
spatial constraints. This scheme implies that multiple
positive examples are required to learn non-constant-
length spatial constraints.
3. R3 Straighter programs are favored over ones with more
bends. This simplifies programs.
4. R4 We consider the cells above and to the left of positive
examples to be implicit negative examples.
Data Structures The effect of a constraint on a spreadsheet
is a set of cells. We represent node matches as a bit vector
(using .NET’s BigInteger struct). Likewise, we represent
edge matches as a mapping from cell coordinates to bit vec-
tors. In both cases, the length of the bit vector corresponds
to the number of cells in the spreadsheet, and the coordinate
of a given index in the bit vector is determined by a map-
ping function, f. In the bit vector, a “1” at index i means
that the constraint matched a cell at coordinate f(i) in the
spreadsheet; a “0” indicates no match.
This representation is efficient for three reasons: 1)
Matches are stored efficiently. For Node constraints, only
one bit per cell is required. 2) Questions such as “does this
constraint satisfy all positive examples?” can be answered in
constant time using bit vector arithmetic. For this purpose,
we bitwise-AND the effect of a constraint with the bit vec-
tor representing the positive examples. If the resulting bit
vector equals the positive example bit vector, then answer
is yes, otherwise no. 3) Operations requiring bit-counting
can be done in O(# bits set) using Wegner’s bit-counting
algorithm [27]. Bit-counting is frequently used in our rank-
ing schemes to count the number cells matching a particular
criteria.
We are able to evaluate partial programs efficiently during
search using a dynamic programming scheme by caching
the effect of each constraint on the input spreadsheet. Lastly,
partial program evaluation can largely happen in parallel and
before the synthesizer runs (i.e., offline). With a large set of
constraints, this is especially beneficial, as the system can
process constraints in the background before users invoke
the program synthesizer.
FLASHRELATE 11 2014/4/23

5. Evaluation
In this section, we evaluate the design of FLARE and
FLASHRELATE on a variety of real-world spreadsheets. The
purpose of this evaluation is to answer the following ques-
tions:
1. It is possible to manually write FLARE programs to per-
form a diverse set of extraction tasks?
2. Can FLASHRELATE automatically infer equivalent pro-
grams for the same set of tasks as in question 1?
3. How effective are our heuristics at reducing the execu-
tion time and number of examples required by the syn-
thesizer?
5.1 Benchmark Spreadsheets and Tasks
To evaluate FLASHRELATE, we assembled a collection of 43
benchmarks using spreadsheets taken from other work on
reorganizing spreadsheet tables, from our own microbench-
marks for testing purposes, and from a large spreadsheet cor-
pus created for research purposes.
Benchmark Selection Our evaluation considers two sets
of benchmarks
1
. The first set of benchmarks were borrowed
from prior work [16] that examined 51 table-transformation
programs from Excel user-help forums. Despite the appar-
ent complexity of these tasks, we found to our surprise
that nearly half (22) of the transformations were straight-
forward relational extraction tasks in FLARE. To round out
our evaluation with more difficult tasks, we assembled a sec-
ond set of benchmarks by searching the EUSES spreadsheet
corpus [11] for spreadsheets with complex ad-hoc encod-
ings. This second set of benchmarks was chosen specifically
to test our synthesis algorithm against challenging extrac-
tion tasks. We also supplemented this second set with syn-
thetic benchmarks known to present challenges to our syn-
thesizer. As a measure of the complexity of the extractoin
task for each benchmark, we note the number of variable-
length Edge constraints that appear in our ground truth pro-
grams (“k*” in 16).
Expressiveness To evaluate the expressiveness of FLARE,
we manually wrote a correct Flare program for each bench-
mark and extracted the resulting output table. In the course
of this effort, we found that the FLARE language is expres-
sive enough to extract the desired tuple from all of multi-
dimensional data patterns we observed. We conclude that,
independent of our ability to synthesize a FLARE program,
FLARE is an effective tool for expressing data extraction
tasks against semi-structured data projected into a two-
dimensional grid.
Synthesizer Experiments Using our ground truth pro-
grams, we compare the results of the FLASHRELATE syn-
thesis algorithm to evaluate its effectiveness. Recall that syn-
thesis depends on providing a set of positive and negative
examples to the synthesis algorithm as described in §4 .
1
All benchmarks will be made available online.
The following method is intended to simulate a user in-
teracting with FLASHRELATE. The relational table extracted
by the ground truth query represents the user’s desired ex-
traction output; we call this the oracle. After each invocation
of the FLASHRELATE algorithm by our simulated user with
a set of examples, we determine whether the synthesized
program is correct by comparing its output against the or-
acle. When the FLASHRELATE output differs, the user finds
the first tuple that deviates from the oracle by scanning the
extracted table from top to bottom. Deviant tuples come in
two forms: 1) if a tuple from the oracle is missing from the
program output, it is a positive example; 2) if a tuple from
the program output does not appear in the oracle, it is a neg-
ative example. We repeat this process until the synthesizer
either finds a program whose output matches the oracle or
we time-out. 10 minutes was chosen as the maximum total
duration of the task as we felt that typical users longer wait
times intolerable.
In our experiments, we consider 5 algorithm configura-
tions to understand the benefit of our ranking choices. In all
cases, regular expressions come from a small corpus (< 100)
of common patterns combined with the regular expression
generator described in § 4. Each configuration examines the
effect of adding a ranking scheme to the FLASHRELATE al-
gorithm. Experiment configurations are: 1) all rankings, 2)
R1, R2, and R3, 3) R1 and R2, 4) R1, and 5) no rank-
ing. For each ranking scheme, R# refers to the procedure
described in §4.2.4 (Ranking).
5.2 Results
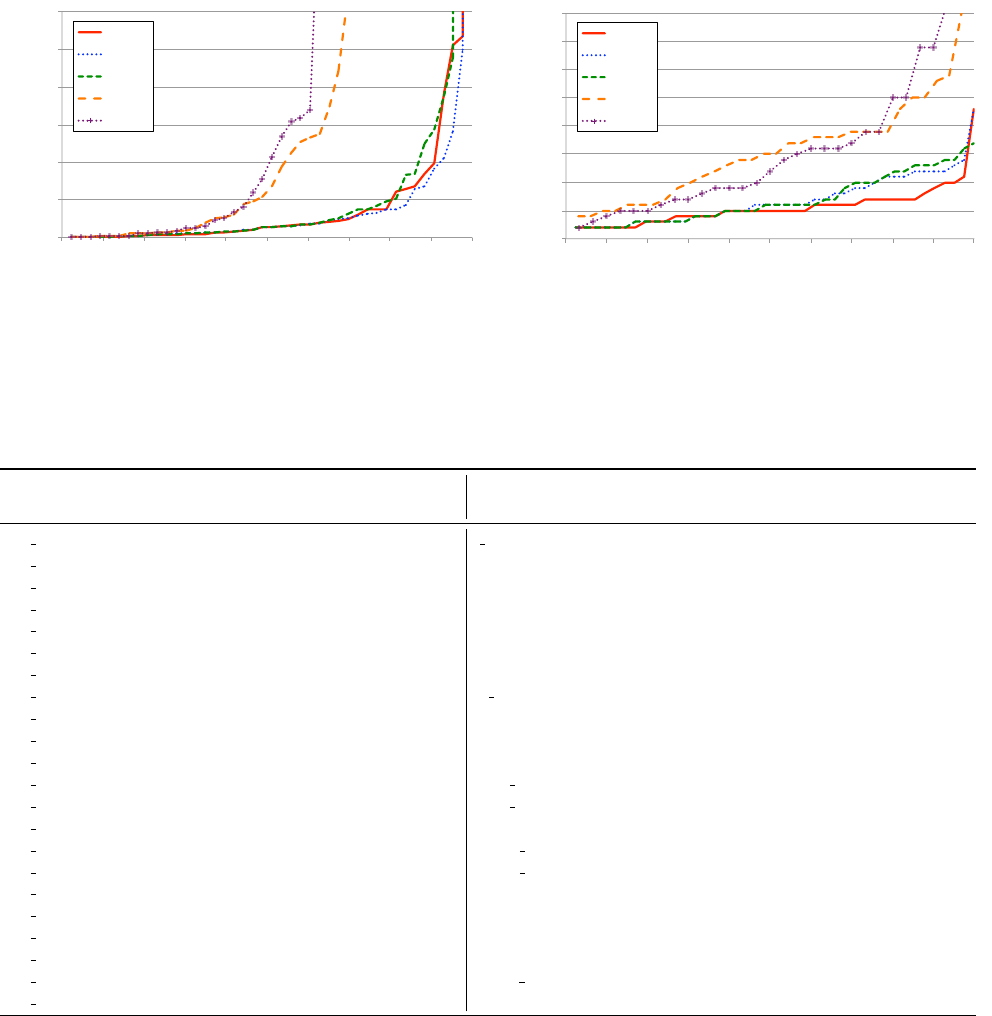
Fig. 15a shows the total time it takes to synthesize our
43 benchmarks. The y-axis shows the running time of the
synthesis algorithm in cases where it succeeded. The axis
is truncated at 60 seconds since, with ranking, most bench-
marks succeed well before that time.
In the best case (all rankings), the algorithm failed to find
a solution within 10 minutes for only 1 out of 43 bench-
marks. When synthesis found a correct solution, more than
80% of the benchmarks completed in less than 10 seconds
total. Per-iteration time is extremely fast: typically a user
only has to wait 1.6 seconds (median: 0.6 seconds).
Fig. 15b shows the number of examples (iterations) re-
quired to synthesize the correct result. Users only need to
provide an average of 3.5 positive examples (median: 3 pos-
itive examples) and 2.0 negative examples (median: 1 neg-
ative example). Without ranking, the algorithm is signifi-
cantly slower, and fails to find a solution more often before
a timeout occurs (for 13 total timeouts). Without ranking,
the algorithm also requires many more examples: an aver-
age of 3.0 positive and 13.7 negative examples (medians:
3 positive; 9 negative). We conclude that without ranking,
sometimes very general solutions are generated (matching
too many cells) and thus numerous negative examples are
required to sufficiently narrow the selection.
FLASHRELATE 12 2014/4/23
0"
10"
20"
30"
40"
50"
60"
0" 10" 20" 30" 40" 50" 60" 70" 80" 90" 100"
#"of"Seconds"
%"benchmarks"synthesized"in"≤""Y"total"seconds"
all"
R1,R2,R3"
R1,R2"
R1"
none"
0"
5"
10"
15"
20"
25"
30"
35"
40"
0" 10" 20" 30" 40" 50" 60" 70" 80" 90" 100"
#"of"Examples"
%"of"benchmarks"requiring"≤"Y"examples"
all"
R1,R2,R3"
R1,R2"
R1"
none"
(a) (b)
Figure 15: (a) Total benchmark synthesis times with ranking and without ranking schemes. Lower numbers are better. For
example, none (no heuristics) succeeded on roughly 60% of the benchmarks before the timeout whereas all succeeded on all
but one. (b) Number of examples required to successfully synthesize a program with and without ranking schemes. Lower
numbers are better. Generally, all required fewer examples than the other heuristics.
pre worst pos # # # # pre worst pos # # # #
(sec) (sec) + neg k* col rec cells (sec) (sec) + neg k* col rec cells
hg ex2 0.1 5.7 3+2 0 9 14 270 h8d62ck 0.2 2.7 5+5 2 8 62 864
hg ex3 0.0 0.2 2+2 0 2 15 168 02rise 0.0 5.0 4+1 0 12 6 175
hg ex4 0.0 0.2 2+1 1 2 6 9 03-1-report 0.1 0.4 6+1 4 4 177 702
hg ex5 0.0 0.2 2+1 0 2 92 128 03PFMJOUR 0.1 2.0 3+2 1 7 10 288
hg ex6 0.0 0.3 5+2 2 3 9 68 1213 0.1 1.0 3+2 4 4 116 350
hg ex7 0.0 19.9 3+1 0 17 3 171 1214 1.7 0.9 5+2 3 3 62 162
hg ex8 0.0 1.1 5+4 3 5 250 240 2003FinalPop 0.5 0.2 3+2 1 2 191 1113
hg ex9 0.0 0.1 1+1 0 1 8 8 3 4 0.2 1.3 3+4 1 5 68 522
hg ex10 0.0 0.2 2+1 1 2 20 30 3q2000 0.9 19.3 4+1 0 19 5 3780
hg ex11 0.0 0.3 3+3 2 3 19 42 3yrsegment 0.1 1.7 3+1 2 5 55 750
hg ex12 0.1 1.9 3+1 0 9 3 252 4q03fax 0.2 0.9 7+3 2 3 186 1394
hg ex13 0.0 0.5 4+2 4 4 5 63 act3 23 0.0 0.7 3+4 3 3 24 175
hg ex17 0.0 0.4 1+1 0 4 16 160 act4 023 0.1 0.6 4+3 2 4 222 312
hg ex18 0.0 2.0 3+2 0 6 3 28 Appen4-5 TO TO NA 3 4 99 1020
hg ex26 0.0 0.4 1+1 0 4 4 16 ascap 2000 0.3 0.8 5+1 0 6 168 252
hg ex29 0.0 4.0 1+1 0 9 3 60 ascap 2001 0.1 0.8 5+1 2 6 39 1037
hg ex35 0.6 6.4 4+1 0 14 36 2786 e-learning 0.2 2.2 8+15 4 6 127 522
hg ex36 0.0 0.8 1+1 0 6 3 36 Favorite 0.0 0.3 3+3 2 3 36 68
hg ex37 0.0 2.0 1+1 0 10 5 55 historical 0.3 1.3 10+1 3 4 251 1911
hg ex39 0.1 0.2 2+2 0 2 49 146 Staircase 0.0 0.3 3+2 2 3 3 9
hg ex40 0.0 8.9 1+1 0 12 1 12 Table 201 0.2 4.9 7+1 4 9 45 540
hg ex41 0.1 3.2 7+1 2 10 171 840
Figure 16: Benchmarks from [16] are shown on the left while benchmarks from [11] are shown on the right. pre (sec) is the
precomputation time; worst (sec) is the duration of the longest iteration; pos+neg is the number of positive and negative
examples required for synthesis; # k* is the number of Kleene stars in the ground truth program, a measure of its complexity;
# col is the number of columns in the output table; # rec is the number of records in the output table; # cells is the number
of cells in the used range of the input spreadsheet. TO indicates that the synthesis algorithm timed-out after 10 minutes. We
abbreviate file names for compactness.
Table 16 summarizes the time and number of examples
required by the algorithm with all rankings enabled as well
as benchmark complexity.
We find that FLASHRELATE is quite successful at syn-
thesizing the appropriate program quickly and with a small
amount of user effort. Furthermore, while one ranking
scheme sacrifices a slightly higher speed for fewer itera-
tions (R4), which we consider to be an acceptable tradeoff,
generally our ranking schemes reduce both the number of
examples required and the time the user has to wait.
FLASHRELATE 13 2014/4/23
5.3 Experimental Setup
We evaluated synthesis on typical end-user hardware. Our
test machine was a AMD Phenom II X4 940 quad-core
desktop machine running at 3GHz with 4GB of RAM.
FLASHRELATE was written in a mix of F# and C# as a
Microsoft Excel 2010 VSTO.NET plugin for Windows 8.
5.4 Future Work
Users sometimes use other encodings, like color or type-
face formatting. While FLARE does not currently support
constraints based on these attributes, they are a straight-
forward extension to our work. Combining FLASHRELATE
with other program synthesis techniques would allow end
users to handle ad-hoc in-cell encodings [15].
6. Conclusion
The flexibility of spreadsheets allows users to combine data
definitions and data views, providing expressiveness at the
expense of utility. The ad-hoc structure of such spreadsheets
makes it challenging to leverage existing tools (for data
analysis, etc.) that require data to be present in a standard
relational format. We present FLARE, the first language to
allow users to express relational extraction queries against
semi-structured, two-dimensional spreadsheet data. FLARE
is much like a two-dimensional AWK. We also present
FLASHRELATE, an algorithm for the automatic synthesis of
FLARE programs from user-provided positive and negative
examples. Using EUSES and other spreadsheet benchmarks,
we show that we can often synthesize programs that users
want, making FLARE accessible to non-experts.
A video demonstration of FLASHRELATE is available at:
http://tinyurl.com/oz72quh
References
[1] R. Abraham and M. Erwig. Header and unit inference for
spreadsheets through spatial analyses. In VL/HCC, pages
165–172, 2004.
[2] D. Angluin. Learning regular sets from queries and counterex-
amples. Inf. Comput., 75(2):87–106, 1987.
[3] M. Anselmo, D. Giammarresi, and M. Madonia. Regular ex-
pressions for two-dimensional languages over one-letter al-
phabet. In Developments in Language Theory, Lecture Notes
in Computer Science. 2005.
[4] M. J. Cafarella, A. Halevy, and J. Madhavan. Structured data
on the web. CACM, 54(2):72–79, 2011.
[5] Z. Chen and M. Cafarella. Automatic web spreadsheet dat
extraction. In SSW’13, 2013.
[6] Z. Chen, M. Cafarella, J. Chen, D. Prevo, and J. Zhuang. Sen-
bazuru: a prototype spreadsheet database management sys-
tem. PVLDB, 6(12):1202–1205, 2013.
[7] J. Cunha, J. Saraiva, and J. Visser. From spreadsheets to
relational databases and back. In PEPM 2009, pages 179–
188. ACM, 2009.
[8] A. Das Sarma, A. Parameswaran, H. Garcia-Molina, and
J. Widom. Synthesizing view definitions from data. In ICDT,
2010.
[9] E. Ferrara, P. De Meo, G. Fiumara, and R. Baumgartner. Web
data extraction, applications and techniques: a survey. arXiv
preprint arXiv:1207.0246, 2012.
[10] K. Fisher and D. Walker. The PADS project: an overview. In
ICDT, 2011.
[11] M. I. Fisher and G. Rothermel. The EUSES Spreadsheet
Corpus: A shared resource for supporting experimentation
with spreadsheet dependability mechanisms. In 1st WEUSE,
pages 47–51, 2005.
[12] D. Giammarresi, F. Venezia, and A. Restivo. Two-dimensional
languages, 1997.
[13] S. Gulwani. Automating string processing in spreadsheets
using input-output examples. In POPL, 2011.
[14] S. Gulwani. Synthesis from examples: Interaction models and
algorithms. In SYNASC, 2012.
[15] S. Gulwani, W. Harris, and R. Singh. Spreadsheet data ma-
nipulation using examples. CACM, Aug 2012.
[16] W. R. Harris and S. Gulwani. Spreadsheet table transforma-
tions from examples. In PLDI, 2011.
[17] J. Kari and C. Moore. Rectangles and squares recognized by
two-dimensional automata. Theory Is Forever, 2004.
[18] H. Lieberman. Your Wish Is My Command: Programming by
Example. Morgan Kaufmann, 2001.
[19] E. Lu, R. Bodik, and B. Hartmann. Quicksilver: Auto-
matic Synthesis of Relational Queries. Technical Report
UCB/EECS-2013-68, UC-Berkeley, May 2013. URL
http://www.eecs.berkeley.edu/Pubs/TechRpts/
2013/EECS-2013-68.html.
[20] O. Matz. Regular expressions and context-free grammars for
picture languages. In STACS, 1997.
[21] E. Oro and M. Ruffolo. Sila: a spatial instance learning
approach for deep webpages. In CIKM 2011, pages 2329–
2332. ACM, 2011.
[22] E. Oro, M. Ruffolo, and S. Staab. Sxpath: extending xpath
towards spatial querying on web documents. PVLDB, 4(2):
129–140, 2010.
[23] M. Pradella, A. Cherubini, and S. C. Reghizzi. A unifying
approach to picture grammars. Information and Computation,
209(9), 2011.
[24] T. Register. Microsoft feeds excel to supercomputer, Nov.
2009. URL http://www.theregister.co.uk/2009/11/
18/sc09_microsoft_excel_hpc/.
[25] R. Singh and S. Gulwani. Learning semantic string transfor-
mations from examples. PVLDB, 5, 2012.
[26] Q. T. Tran, C.-Y. Chan, and S. Parthasarathy. Query by output.
In SIGMOD, 2009.
[27] P. Wegner. A technique for counting ones in a binary com-
puter. Commun. ACM, 3(5):322–, May 1960. ISSN 0001-
0782. . URL http://doi.acm.org/10.1145/367236.
367286.
FLASHRELATE 14 2014/4/23
